A agência espacial dos EUA está atualmente com o objetivo de coletar amostras do asteróide potencialmente perigoso Bennu. Além disso, outro dia eles apresentaram o mapa mais detalhado deste objeto até hoje.
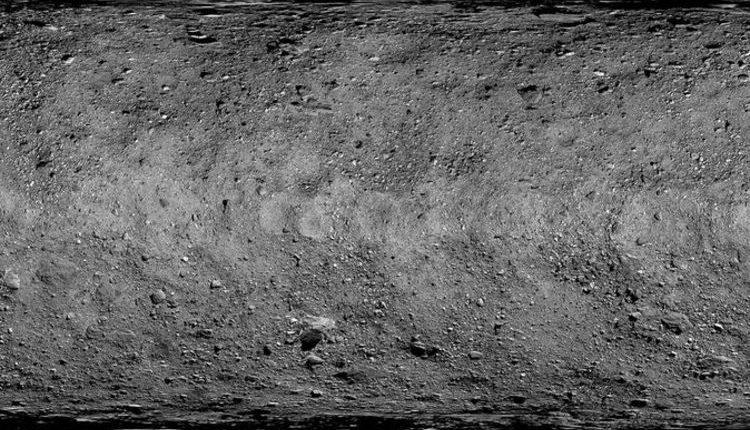
Este mapa da superfície do asteróide Bennu é um mosaico de imagens coletadas pela espaçonave OSIRIS-REx entre 7 de março e 19 de abril do ano passado. A Agência Espacial dos EUA confirmou que 2.155 imagens tiradas com a PolyCam foram costuradas e corrigidas para produzir este mapa detalhado.
O detalhe é de 5 cm por pixel. A espaçonave da NASA coletou essas imagens a distâncias de 3,1 a 5 quilômetros acima da superfície do asteróide. Versões de mosaico em tamanho real estão disponíveis para download aqui (apenas mosaico) e aqui (mosaico do sistema de coordenadas).
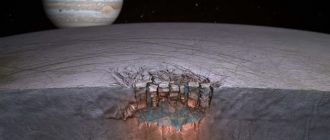
Neste verão, a espaçonave OSIRIS-REx fará a primeira tentativa da NASA de tocar a superfície de um asteróide, coletar amostras e retornar com segurança. No entanto, mais de um ano se passou desde a chegada do dispositivo ao asteróide Bennu. Isso se deve ao fato de que a superfície do objeto acabou sendo muito mais rochosa do que se pensava. Ele está literalmente cheio de pedras.
A missão originalmente previa uma área de pouso de 50 metros de diâmetro, mas as maiores áreas seguras em Bennu eram muito menores. A seção maior tem apenas 16 metros de largura, o que corresponde a cerca de 10% da área segura assumida.
A equipe percebeu que precisava de técnicas de navegação mais precisas que permitiriam à espaçonave mirar com precisão áreas muito pequenas, evitando perigos potenciais. Usando essas pedras perigosas como sinais, a equipe da missão desenvolveu um novo método de navegação de precisão para resolver esse problema.
O plano original era usar o sistema LIDAR baseado em pulsos de laser em vez de ondas de rádio. No entanto, em face desse problema, a equipe OSIRIS-REx mudou para um novo método de navegação denominado Natural Feature Tracking.
Ele fornece recursos de navegação mais amplos do que o LIDAR e é a chave para colocar a espaçonave em uma área de amostragem muito menor. O método é baseado na navegação óptica e requer a criação de um catálogo de imagens em alta resolução a bordo da espaçonave.